Research Area
Prevalence of the next generation of wearable robots would rely not only on their functionality but also on their conformity and convenience. Our mission at SRRC is to utilize novel functional materials, manufacturing techniques, design frameworks, and control algorithm to develop “soft” wearable devices. Our objective is to assist individuals with reduced mobility in performing daily tasks and to augment the capabilities of healthy individuals.




Materials composing soft robots are usually soft and compliant, whereupon they carry safety and adaptability for tasks at the human-robot interface and elsewhere. Development of material combinations and their architectures is an appealing challenge of soft, wearable robots. Our center provides a solution to this challenge by employing strategies of nanomaterials, structural design, and rigid-soft hybrid design.
Nanomaterials such as nanoparticles, nanowires, carbon nanotubes, and liquid metals can be functional bases of soft materials. We synthesize these nanomaterials, control their electrical, mechanical and optical properties, and pattern them into stretchable transparent conductors, touch pads, heaters, and other soft robot components, by leveraging state-of-the-art technologies including selective laser ablation, direct ink writing, 3D printing, and other solution/deposition processes.
Origami, the art of folding, is a promising platform that provides capabilities of deployment and body compliance to several parts of a robot. We develop various scales of assemblies, actuation and locking mechanisms, and bioinspired dual morphing capabilities of origami architectures. Representative achievements include a self-locking foldable robotic arm that achieves 17.5 times length extension and 200 times larger resistance to compression, and a new architecture of deployable soft robots that can first unfold and then stretch in response to fluidic pressure like the design and morphing principle of the biological analog, Eurypharynx pelecanoides (commonly known as the pelican eel).
Compliant bodies consisting of rigid-soft hybrid structures have versatility in stiffness engineering and unfamiliar mechanical responses. Using this hybrid concept, we develop hybrid pneumatic networks, auxetic elastomer patches, and various jamming mechanisms for reconfigurable variable stiffness, including tendon-driven jamming and sliding linkage-based layer jamming. These technologies demonstrate multiple applications for soft sensors and wearable robots.



We aim to lead soft actuator technologies, ranging from the world-leading performance actuators to high-value wearable devices, that are rendered into commercial products.
In terms of improving mechanical efficiency, we adopt the bioinspired design and origami structures in soft materials including polymers for pneumatic actuators, shape memory polymers (SMPs), shape memory alloys (SMAs), and etc. Furthermore, based on the characteristics of the human body, we develop soft actuator design technologies for artificial muscle.

Soft sensors are becoming more popular in wearables for tracking human body motions and electrophysical signals due to their high stretchability and easy wearability. We research various novel sensing systems with soft materials, including liquid metal-based stretchable position/force sensors, transparent touch sensors, bioinspired sensorized artificial muscles, and stretchable sensors for electrophysical monitoring.
Our research also includes the calibration and processing of sensor signals. While soft sensors involves high nonlinearity and hysteresis, we utilize deep learning for full-body motion sensing, which significantly increases efficiency in calibration of the soft sensor and estimation of the body motions.
One of the recent technologies that evolving rapidly for the human is soft wearable robots. Soft wearable robots are designed for humans to wear during daily life for various purposes, such as rehabilitation exercise, an assistive device for daily livings, supporting repetitive tasks, enhancing strengths and so on.
To fulfill the needs of the soft wearable robots, researchers have developed various robots that can be worn on different body parts for the past decade and shown strong commercial potentials. Meanwhile, human wearing robots remain a number of issues to be solved. The robots worn by the human need to understand the user’s complex movement and their desires.
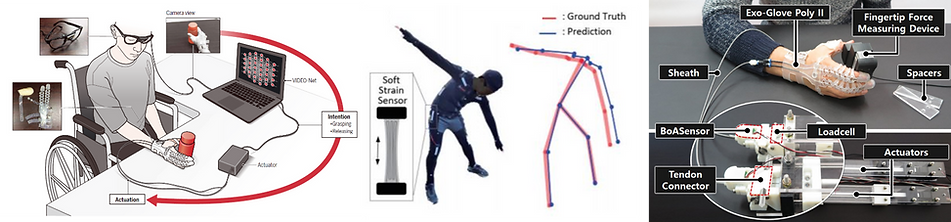
SRRC research teams are pursuing to implement artificial intelligence into soft wearable robots for the robots to better understand human users. As a result, our research team presented a paradigm for learning-based intention detection based methodologies that perceive user intentions for wearable robots, by utilizing a first-person-view camera. The hypothesis of the approach is that user intention is inferred through observation of the user’s arm and the target object, by incorporating previous behaviors captured from a first-person perspective (egocentric view). To perceive user intentions from the egocentric view, the study introduced a deep learning algorithm: Vision-based Intention Detection network from the Egocentric view (VIDEO-Net). To verify the practical deployment, this method was tested on both an SCI patient and healthy subjects.
To present other researches from SRRC, the research team has developed an AI algorithm that can estimate the user’s behavior patterns based on sensor data from the meta-suit. The study proposed the sequence encoder-kinematic decoder model and shown the algorithm can be potentially used to estimate or calibrate the relationship of sensor data and human body joint. Not only related to the human behaviors, but SRRC research teams have also developed other AI algorithms for soft robot wearable technologies: an algorithm that can estimate fingertip force of a soft wearable hand robot based on data from actuation system, an algorithm that can calibrate non-linearity and hysteresis of soft sensors, and an encoding algorithm based on semi-supervised learning method to minimize the required labeled data to learn human motions.